|
A question was
brought up when I was choosing a helicopter for the job.
Turbine, nitro, gas
or electric? I asked around for other people's
advice and what they were using. I found most were using
electric for AP.
The main concern people had was
noise. People didn't want to attract attention in certain
areas. They wanted to be discreet.
With electric it's cleaner.
You simply plug-n-fly. You don't have to deal with the mess of
liquid fuel.
The disadvantage of electric is
shorter flight time compared to a gas helicopter.
Quite
honestly, I think both gas and electric has its place in AP.
Most aerial photographers use
Lithium Polymer (LiPo) for more power. But due to
the weight of their camera mount, camera body, lens and various
other electronics the flight time is considerably reduced.
Even with these disadvantages electric still fulfills the
requirements for most AP work. For a seasoned AP pilot the
average flight time ranges between 5 to 8 minutes to acquire the
images they need.
How much power?
Initially I wanted the most power
I can carry so I wanted LiPos. Then I realized they came in
different configurations. Then someone asked what speed
controller will you be using? Then another, "What is your
target head speed?". and, "What's the Kv rating of your
motor?" Things just got very complicated.
@#$%^&*!. I really didn't
expect any of this. LOL I thought everything was
plug-n-fly. NOT!

Main battery above (2 x 6s per
flight) and receiver
battery (2s) below.
ESC (Electronic Speed
Controller... some call it Engine Speed Controller)
ESC controls the motor.
I
needed an ESC that can handle the high power of LiPos. For high power
capacity the Kontronic Power Jazz and Schulze Future 40.160 speed
controllers are recommended.
UPDATE (2010) : There
are newer models from Kontronic and Schulze.
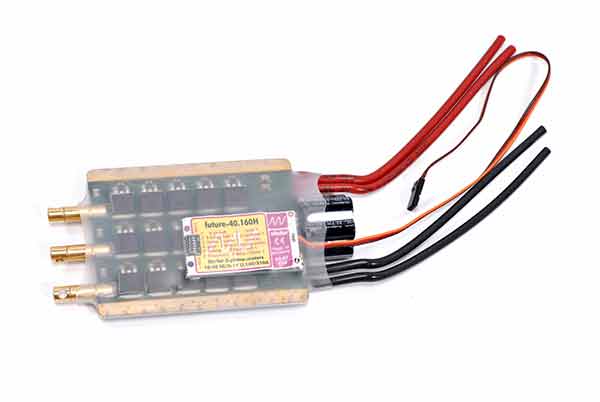
Schulze Future 40.160
Head Speed
Head speed is the RPM of the
main rotor. The necessary head speed to fly ranges 1200 to
2000 RPM. The head speed you choose depends on the size of
blade you will be using.
Since this is for AP work a lower head speed between 1250 - 1450
is all you need for an 800 (800, 810, 830) size blade.
For a 700 (690, 700,
710) size blade you could run between 1600 to 1700 head
speed.
For a 600 (600, 610,
620) between 1800 to 2000 head speed.
Motor Pinion
The
motor pinion partly determines your head speed.
The motor pinion is the gear that
attaches directly to your motor. This comes in various
number of teeth. This can be changed to achieve the necessary
head speed. More teeth the higher the head speed.

16T Pinion

12T and 13T Pinions available at
Minicopter.
Kv
Kv is the no-load RPM of the
motor. (per volt)
The Kv rating for the Pletti motor is 510.
What does this all
mean?
So the number of cells the LiPo
batteries has, the number of teeth on the motor pinion and main gear
and the Kv rating of the motor will determine your head
speed (HS).
There is a math formula to
calculate your head speed. I'm not a math mathematician but it
goes something like this:
For Voltage: Lipo Voltage per
cell x Number of cells. ie: 3.8 x 12 = 45.6 Volts
NOTE: A Lipo's max
voltage is 4.2v. But during load the average voltage drops to
3.8v. That's why I use 3.8v to calculate with.
For Motor speed: (Voltage x
Motor Kv) x Efficiency. ie: (45.6 x 400) x 90% = 16,416
(motor speed)
(NOTE: You could change
the Efficiency value to figure out how your heli is truly
performing.)
For Gear Ratio: This depends if
your heli has a one stage or two stage gear reduction system.
Let's go with the Maxi Joker's two stage.
(2nd gear / Motor Pinion) x (
Main gear / 3rd gear). ie: (34 / 13) x (67 / 14) = 12.52 Gear
Ratio
For Head Speed: Motor Speed
/ Gear Ratio. ie: 16416 / 12.52 = 1311.55 Head
Speed
This is a rough calculation to
get you close to your target head speed. There are many other
variables that can affect your exact head speed.
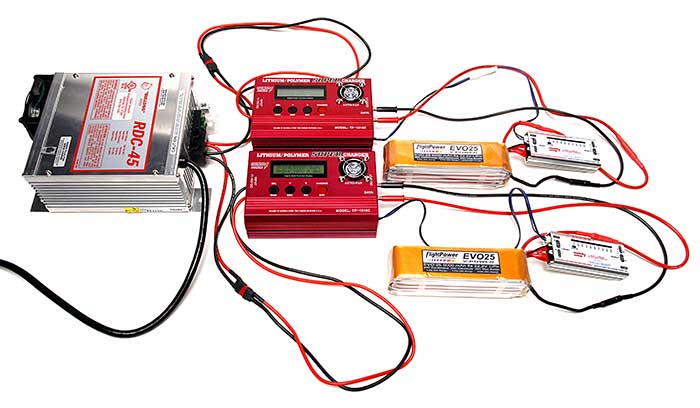
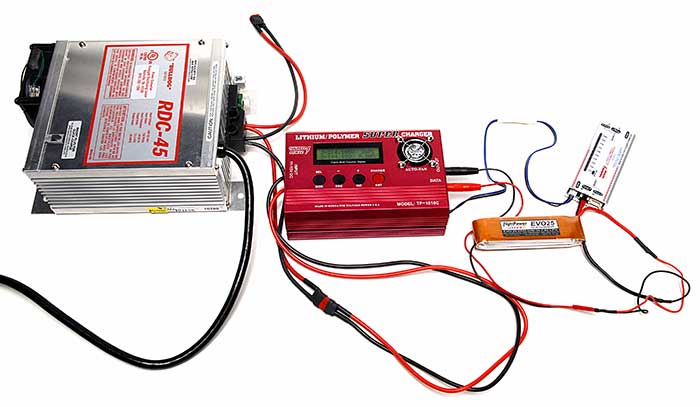
Power
Management
|
 |
|
Rivergate's RDC-45
45 AMP Power
converter. |
|
| |
|
|
 |
|
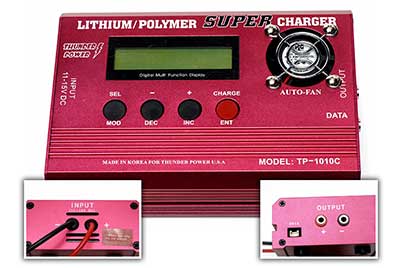
Charger for your
LiPos.
Thunder Power's
1010C.
You can charge up to
10 cells. |
|
| |
|
|
 |
|
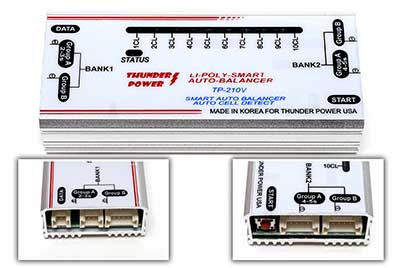
Balancer.
Thunder Power's
TP-210V.
You can balance up to
10 cells. |
|
| |
|
|
 |
|
Voltage regulator.
You'll need one of these if you change your receiver
battery to LiPos.
The 5.1V regulator,
below, goes between the Gyro and tail servo. |
|
| |
|
|
WARNING
The Align voltage
regulator shown above needs some modification. The
wires need to be backed up with some sort of glue.
I used "Shoe Goo". There has been issues with the
soldering failing due to vibrations. I had four
crashes before I figured out what was happening.
To fix, cut the clear
heat shrink wrap. Pry off the silver cover.
It's mounted on with double sided tape. Add "shoe
goo" on the solder points. Put cover back on.
Reseal with clear heat shrink.
|
|
| |
|
| |
|
|
Charging
main batteries
|
|
|
 |
| |
|
| |
|
|
Charging
receiver batteries |
|
|
 |
| |
|
| |
|
| |
|
| |
|
|
Wirings up close... |
|
| |
|
|
 |
|
From the power
converter I used Dean connectors.
Notice the female
ends. This goes with the image below. |
|
| |
|
|
 |
|
On the input side of
the 1010C was originally alligator clips. I
replaced it with Dean connectors.
Notice the male ends.
Goes with the image above. |
|
| |
|
|
 |
|
On the output side of
the 1010C you have to fabricate your own cables. I
bought a set of banana plugs, bullet plugs, 12 gauge
wires and heat shrinks.
This set of wires are
for the main batteries. See image
below. |
|
| |
|
|
 |
|
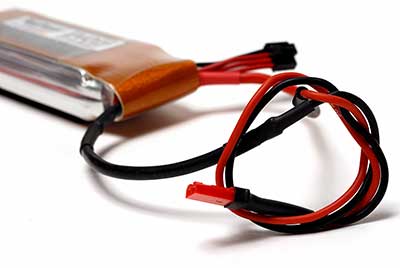
On the main batteries
I used bullet plugs.
WARNING: Be
very aware of the negative and positive ends coming into
contact. I cover mine when not in use. |
|
| |
|
|
 |
|
For charging the
receiver batteries I have a different set of cables.
This one I purchased. This has banana plugs on one
end and BEC female connector at the other.
You can purchase the
BEC male end. See below. |
|
| |
|
|
 |
|
| |
|
|



