|
|
|
|
 |
|
The Plettenberg HP
370/40/A2 Heli motor. |
|
|
|
|
|
 |
|
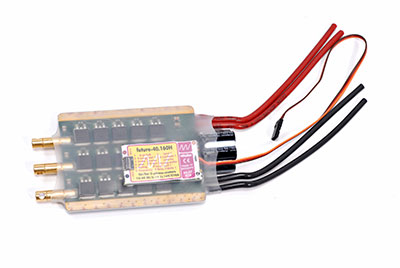
Schulze Future 40.160
speed controller. This controls your motor.
My mistake:
The end of the ESC where it connects to the motor, I
didn't realize the ends comes off. This is where
you'll solder the wires from the motor. Pull them
out before soldering. |
|
|
|
|
|
 |
|
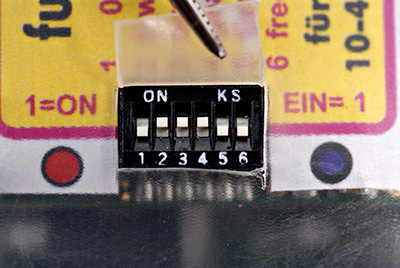
Schulze dip switch settings. |
|
|
|
|
|
 |
|
Futaba 12 channel
receiver. |
|
|
|
|
|
 |
|
3 Futaba 9255 Servos.
These controls your
cyclic. |
|
|
|
|
|
 |
|
Futaba 401 Gyro kit.
The gyro keeps the
nose of the helicopter straight or stabilizes the yaw
movement by adjusting the pitch of the tail blades.
The kit comes with a servo.
NOTE: You can
purchase either the servo or gyro separately. |
|
|
|
|
|
 |
|
My 401 settings.
DS: ON
DIR: REV
DELAY: 0
LIMIT: Adjust
this according to the travel of the tail pitch slider. |
|
|
|
|
|
 |
|
Spartan AP2000i
flight stabilizer.
The AP2000i keeps
your helicopter leveled while hovering. Great for
AP work.
Can be disabled for
forward flight. |
|
|
|
|
|
 |
|
FMA sensor and cable.
This plugs into AP2000i.
Don't forget to order
the cable!
I used the extra
double-sided foam sticky from the Gyro kit.
This uses IR to
detect the horizon. |
|
|
|
|
|
 |
|
Align RCE-B6X voltage
regulator.
If you change your
receiver battery to LiPos then you'll need this. |
|
|
|
|
|
 |
|
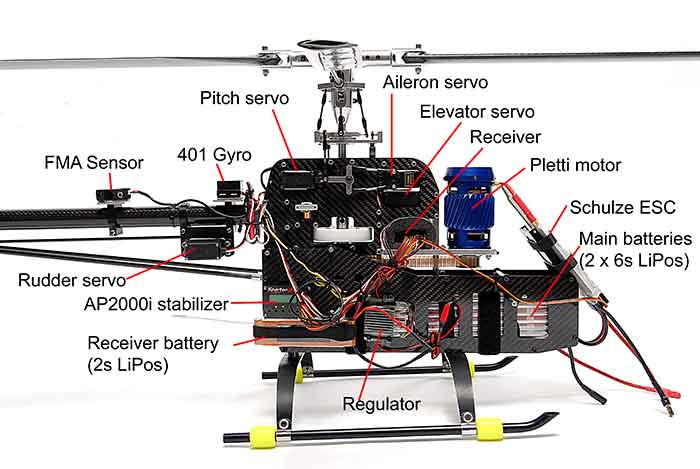
How it all connects.
(I'll clean up the
wiring later... :D )
|
|
|
|

