|
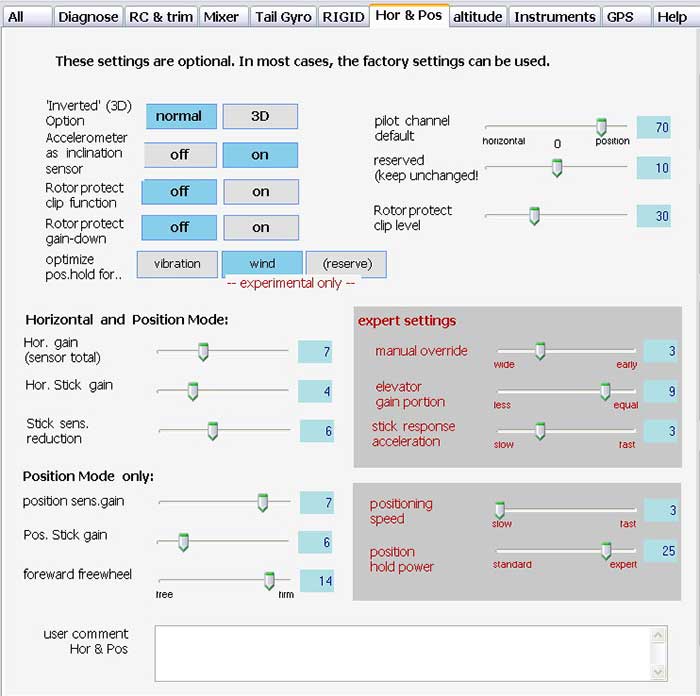
Inverted (3D) Option - 3D
option is for inverted and
normal stabilization.
Accelerometer As Inclination
Sensor - OFF reduces the
sensitivity of the accelerometer
and for taking off from an
inclined plane. ON
requires the use of the autotrim
function to calibrate the
inclination of the sensor.
Rotor Protect Clip Function
- This option is to avoid
tailboom strikes. It will
limit backward cyclic input.
Rotor Protect Gain-Down -
Reduces Position gain setting
when altitude is detected below
1m.
Optimer Pos. Hold for...
- Select which kind of
disturbances the sensor
measurements are optimized.
Pilot Channel Default -
If the Pilot channel is not used
then either horizontal or
position hold can be selected as
its default stabilization mode.
Reserved - N/A
Rotor Protect Clip Level
- Defines the backward cyclic
travel.
Horizontal and Position Mode:
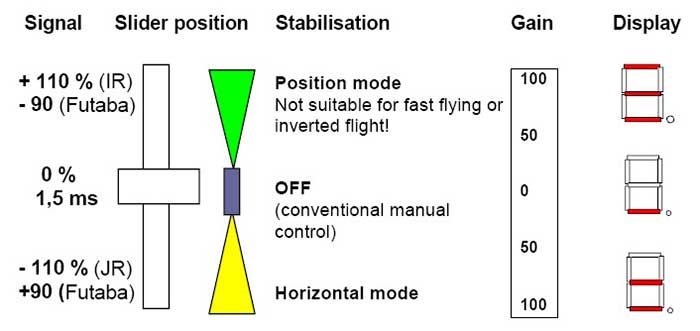
- Image from the manual
As
noted earlier I programmed the
horizontal / positional gain to
my right slider. Check
with the diagnose tab to make
sure the light assignment is is
working according to your setup.
Hor. Gain (Sensor Total)
- Defines gain sensitivity of
aileron and elevator. If
the gain is too high the
helicopter will begin to
oscillate.
Hor. Stick Gain - Defines
the stick input sensitivity.
Stick Sens. Reduction -
For finer stick control when
altitude is below 1.5m.
Expert Settings
Manual Override - Defines
the speed the control of
HeliCommand is overcome by the
pilot.
Elevator Gain Portion -
Reduce this gain if elevator
oscillation occurs.
Stick Response Acceleration
- Defines how direct and rapidly
the stick movements will affect
the attitude in both horizontal
and position hold.
Position Mode Only:
Position Sens. Gain -
Defines gain sensitivity of the
optical ground speed sensing
system.
Pos. Stick Gain - Defines
the stick input sensitivity
Forward Freewheel -
Defines the strength of pilot
manual control.
Expert Settings
Positioning Speed - The
agility for aiming a position
and for velocity changes
on stick command.
Position Hold Power -
Holding power of position hold
mode.
|